1 图探索
1.1 DFS
- 使用栈实现
- 时间复杂度:O(V + E)
- 使用 DFS 判断连通分量的数量
- 每次调用 DFS 时,连通分量数 +1
- 括号定理
- 把调用递归前的操作和递归结束后的操作看作一组括号
- 递归过程中,不同对的括号只有包含和独立的关系,不存在相交
- 只有 ( [ ] ) 和 ( ) [ ],不存在 ( [ ) ]
- 根据访问时间,记作 [pre number, post number]
- 先序遍历和后序遍历
- 边的类型
- Tree edge:DFS 生成树的边
- Forward edge:从一个结点指向非子结点的后代结点的边
- Back edge:指向祖先的边
- Cross edge:指向非祖先也非后代的已访问结点
- 有向无环图 Directed Acyclic Graph (DAG)
- 如果有环,DFS的过程中会发现一个 back edge
- 没有入度的结点称为 source
- 没有出度的结点称为 sink
- 线性化、拓扑排序
- 强连通分量
- 可以将强连通分量看作一个大的结点
- 以这种方式,可以将任何图转化为有向无环图
- 如何寻找强连通分量
- 引理
- 从 sink 出发进行DFS,可以将sink对应的分量全部便利到
- 最大的 post number 一定在 source 中
- 先将图reverse,用 post number 找到 reverse之后的 source,即为原图的 sink
- 从该 sink 出发可以找到对应的强连通分量
- 把该分量记录下来并从原图中拿掉
- 对剩下的图重复上述步骤,从而得到所有分量
- 引理
1.2 BFS
- 使用队列实现
2 最短路
2.1 性质
- 任何最短路的子路径必须是最短路
- 图中有可能没有最短路
- 例如图中有一个负权值的圈
- 最短路的三角不等式
- 描述了可行解与最优解之间的关系
- $d(v_1, v_2) \le d(v_1, v_3) + d(v_3, v_2)$
2.2 Dijkstra 算法
- 单源最短路
- 注意区分于 Prim!那个是最小生成树!两者算法有点类似
- 只能用于边权均为正的图
- 思路
- 维护一个顶点的集合,该集合中所有的最短距离都是已知的
- 每次从该集合外的顶点里选取一个距离源点 s 最近的顶点 v ,并加入到集合中
- 更新顶点 v 所有邻居的距离
- 证明
- 欣赏PPT即可
- 先证明局部最优解 d[v] $\ge$ 最优解 d(s, v) → 反证法
- 证明在算法结束的时候两者是相等的 → 反证法
- 对于无权图,Dijkstra 算法即为 BFS
- 补充:堆
- 优先级队列一般用 heap 实现
- binary heap
- 以最小堆为例:父结点的值小于等于子结点的值
- 插入:在最后增加一个结点,循环往上调 → O(logn)
- 删除:删除根结点,把最后一个结点放在根结点,循环往下调 → O(logn)
- 找最小:就是堆顶值 → O(1)
- d-nary heap
- 用 d 叉树实现
- 二项堆 binomial heap
- $b0$ 是一个点, $b{k}$ 由两个 $b_{k-1}$组成
- 做 merge 时遵循二进制加法原则
- 插入:就是做加法,加上一个 $b_0$
- 删除最小:去掉根结点,把剩下的结点看作一个二项堆,与原二项堆合并
- 删除某个结点:先调整到根结点,再删除
- 斐波那契堆
- lazy 版本的二项堆:先放进来,等到不满足了再调整
- 双向循环链表链接根结点
- 结点中有一个 mark,用于标记子结点是否被删除
- 维护一个指向最小根结点的指针
- 合并操作:将结点数量相同的堆合并起来(fibonacci)
- 删除最小
- 先做二项堆的操作:把去掉根结点以后的部分与
- 如果头部的链表中有结点数相同的堆,则做一次合并
- 将某个结点的值变小 / 变大
2.3 Bellman-Ford 算法
- 解决带负边权的单源最小路问题
- Dijkstra 不能解决负边权的原因
- Dijkstra 认为每次都是局部最优解
- 加入一个局部最小之后就不再改了
- 但是后续有可能加入负边,加入后会比之前的局部最优解更小
- 解决思路:动态规划
- 定义 OPT(i, v):使用 i 条边得到的从 s 到 v 的最短路径
- 考虑取第 i 条边和不取第 i 条边
- $OPT(i, v) = \min { OPT(i - 1, v), \min{ OPT(i - 1, u) + w(u, v)} }$
- 时间复杂度: $O(VE)$,空间复杂度: $O(V^2)$
- 优化 → Bellman-Ford
- 只需要维护一个一维数组 M[v] 即可
- 只有当前值 M[u] 更新时才去 check (u, v) 这条边
- 空间复杂度降到 O(V),时间复杂度最坏是 O(VE),但实际更快
- 如果 OPT(n - 1, v) = OPT(n, v),则没有负圈
- 如何找负圈
- 添加一个结点 s 与所有其他结点相连,且边权均设为 0
- 判断 OPT(n, u) 是否等于 OPT(n-1, u),如果不等则有负圈
2.4 多源最短路
矩阵乘法思路
- 动态规划思路
- $d{ij}^{(m)} = \min_k{ d{ik}^{(m-1)} + a_{kj} }$
- 类似于矩阵乘法: $c{ij} = \sum{k} a{ik} \cdot a{kj}$
- 利用指数幂算法优化该乘法,可以将 $O(n^4)$ 降到 $O(n^3 \log n)$
- 如果没有环,对于最后一次 n,有 $d{ij}^{(n-1)} = d{ij}^{(n)} = d_{ij}^{(n+1)} = \cdots$
Floyd-Warshall 算法
- 如果加入 k 后能使距离变小才加进去,否则不加
- $c{ij}^{(k)} = min_k{ c{ij}^{(k-1)}, c{ik}^{(k-1)} + c{kj}^{(k-1)} }$
- 时间复杂度: $O(n^3)$
Johnson’s Algorithm
思路:将边权 reweight,使得没有负值,从而能使用 dijkstra 算法
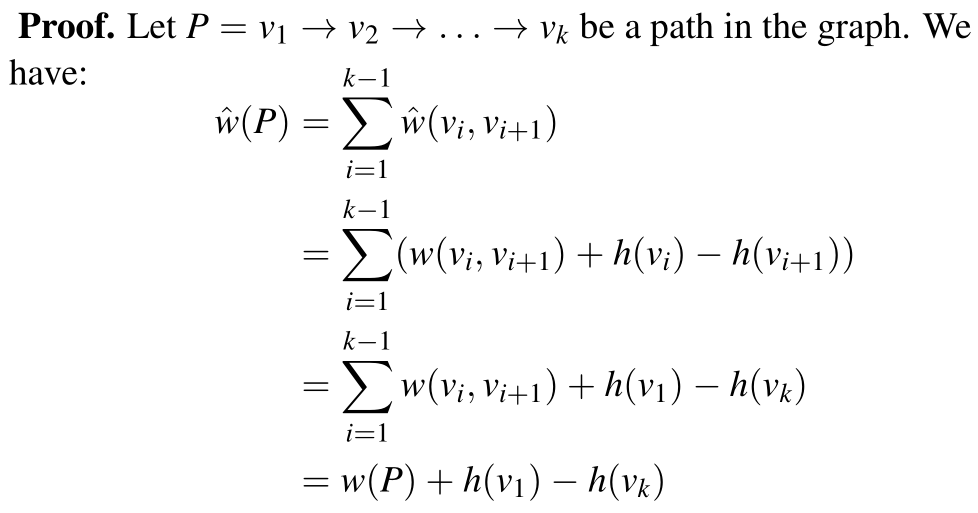
定理:如果按照 $\hat{w} (u, v) = w(u,v) + h(u) - h(v)$的办法进行 reweight,则两个顶点间的任意路径的权值均相同
算法流程
- 新建一个顶点 s,并使其与所有顶点连通,新边赋权值为 0
- 利用 Bellman-Ford 算法求得每个点到 s 的最短路,该值记为顶点的标号 $h(v)$
- 还可以通过这种办法发现负圈
- 时间复杂度 O(VE)
- 用新的权值 $\hat{w}$ ,对每个顶点进行 dijkstra 算法
- 此时的 $\hat{w}$ 为非负值
- 时间复杂度 $O(VE + V^2 \log V)$
- 将所有的 $\hat{w}$ 转化为原始的 w
- 时间复杂度 $O(V^2)$
3 最大流
3.1 概念定义
- 最大流等价于最小割
- 定义流网络
- 源点 s,终点 t
- 从源点出发,每一个结点都可以被访问到
- 每条边 e 都有一个容量 capacity = c(e)
- 定义分割
- 将一个图 V 分割成两个子图 (A, B),记作 s-t cut
- 其中 $s \in A, t \in B$
- 分割 (A, B) 的容量记作从 A 到 B 的所有容量之和
- 最小割问题:找到一个分割,使得该分割的容量最小
- 流的性质
- 每条边上走过的流量 < 该条边的容量
- 对于每个顶点(除源点和终点),进入的流量和出去的流量必须相同
- 定义流的值 = 所有从源点出去的流量 - 所有流入源点的流量
3.2 最大流与最小割
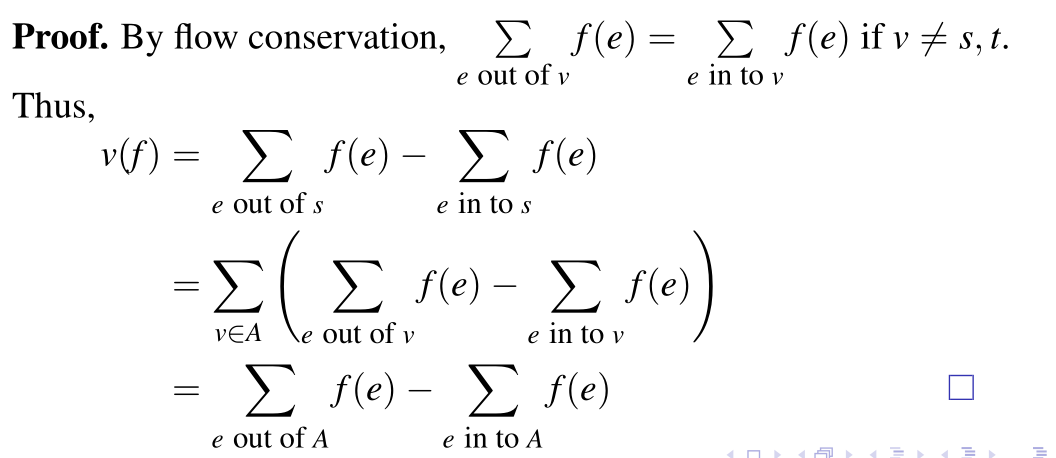
引理:一个流的值与任意一个分割 (A, B) 的 流量相同
- $v(f) = \sum{\text{e out of A}} f(e) - \sum{\text{e in to A}} f(e)$
证明
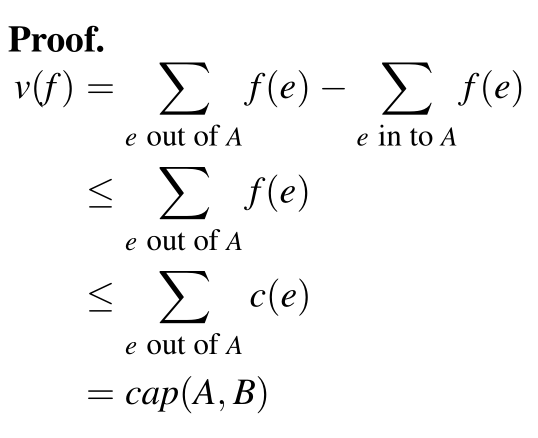
引理:对任意一个分割 (A, B),流的值均小于该分割的容量,即 $v(f) \le cap(A, B)$
证明:
若 $v(f) = cap(A, B)$,则该流 f 为最大流,该分割 (A, B) 为最小割
3.3 Ford-Fulkerson 算法
- 尝试:贪心算法
- 每次找到一条 s 到 t 的路径,添加该路径允许的最大流量
- 重复找路径,直到不能再增加流量
- 贪心算法是不正确的!
- 局部最优解 $\neq$ 全局最优解
- 原因:每次用贪心在一条边上增加了流量后,该流量在后续不会被减少
- 启发:需要找到一个办法,能够“撤回”不正确的流量
- 解决方案:剩余图
- 每次记录一条路径后,增加一条反向边,用于后续撤回
- 在正向边中,记录剩余的流量 $c(e) - f(e)$
- 在反向边中,记录累计的流量 $f(e)$
- 增强路径 Augmenting Path
- 如果该边是正向边,将当前路径的流量瓶颈累计在 f(e) 中
- 如果该边是反向边,将该流量瓶颈从 f(e) 中减去
- 算法流程
- 每次找一条增强路径,并更新图
- 最终结果即是最大流
- 最大流 - 最小割理论:以下三个命题等价:
- 存在一个分割 (A, B) 使 $v(f) = cap(A, B)$
- f 为最大流
- 对于 f 而言没有增强路径
- 复杂度分析(最大容量为 C)
- 增强路径的数量 $\le E \times C$,因为每条增强路径至少增加了 1 点流量
- 寻找一条增强路径(DFS 或 DFS) 需要 $O(V)$ 复杂度
- 因此时间复杂度为 $O(VEC)$
3.3 优化
选增强路径的策略:选取足够大容量瓶颈的路径
- 不一定要选最大的
Capacity Scaling
- 维护 scaling 参数 $\Delta$,初始值为大于等于容量 C 的最小的 2 的次幂
- 令 $G_f(\Delta)$ 为边上的容量均大于 $\Delta$ 的子图
- 在当前的子图中寻找所有的增强路径,并更新流量图
- $\Delta = \Delta / 2$
复杂度分析
外圈循环: $1 + \lceil \log_2 C \rceil$ 次
- 每次对 $\Delta$ 除以 2
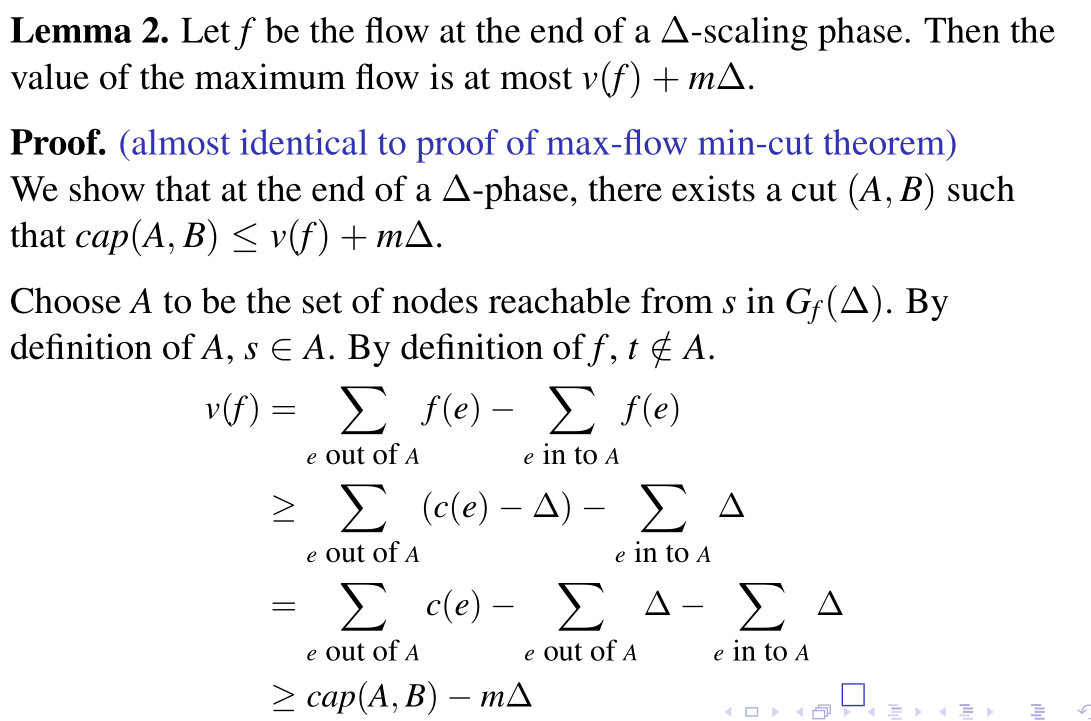
每次循环中的最大流值不超过 $v(f) + m \Delta$
m 为顶点数量
每次迭代中最多找 2m 个增强路径
- 每个顶点来回找两次
因此该算法的增强路径的总数为 $O(m \log C)$
总的时间复杂度为$O(m^2 \log C)$