汇总
Plenoxels: Radiance Fields without Neural Networks
Info
- 会议:CVPR
- 年份:2022
- https://alexyu.net/plenoxels/?s=09
Method
不使用神经网络
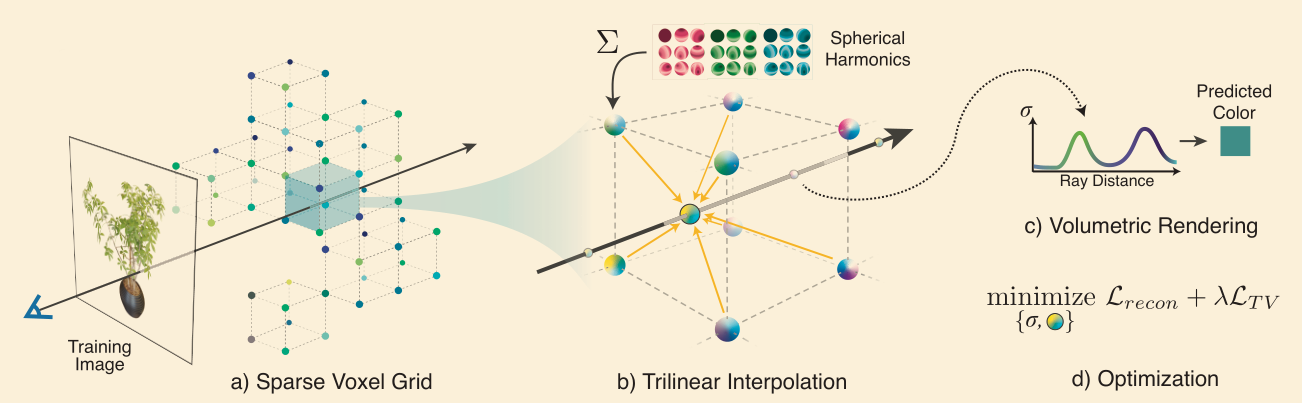
- 场景用 voxel 表达,每个 voxel 的顶点处存储球谐函数的系数
- 使用了 2 阶球谐函数,共 9 个系数 -> 尝试用小波函数优化?
- GAMES202 课件:一般情况下,使用 4 阶 16 个 SH 函数
- 渲染时,每个 voxel 对应的颜色值通过插值得到
- loss:MSE + variation
- 核心工作是加速训练过程
- 该论文的结果表明:NeRF 的关键在于可微分的 volume rendering 部分,而不是神经网络
Result
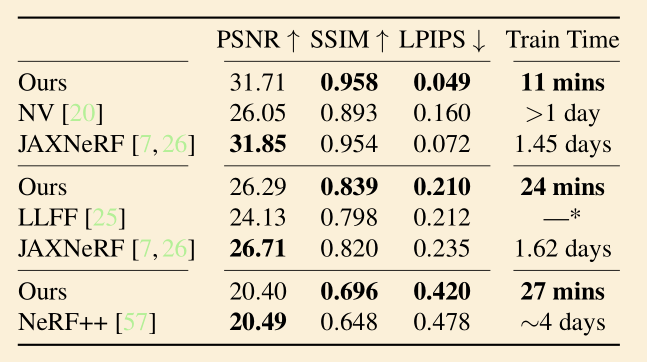
- 只对比了训练时间和图像质量,未给出测试时的帧率等数据
Direct Voxel Grid Optimization: Super-fast Convergence for Radiance Fields Reconstruction
Info
- 会议:CVPR
- 年份:2022
- Plenoxels 提到的相似工作
- https://github.com/sunset1995/DirectVoxGO
Method
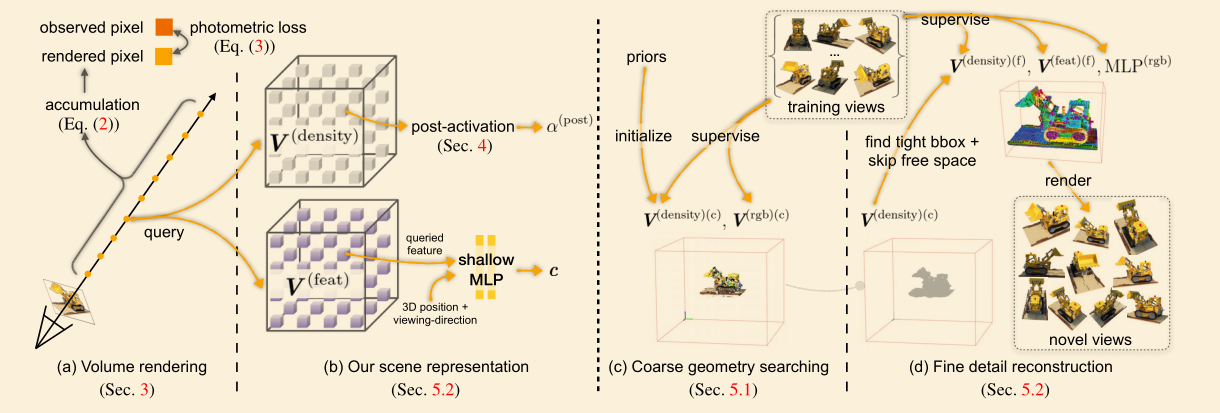
coarse to fine
coarse:低分辨率,颜色值与视线方向无关
- 该过程不使用神经网络
fine:高分辨率,颜色值与视线方向相关
- 使用一个 shallow MLP
- 只有两个隐藏层,每个 128 通道
核心工作仍然是加速训练过程
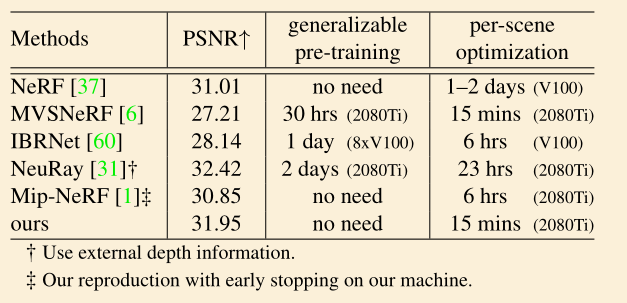
Result
NeX: Real-time View Synthesis with Neural Basis Expansion
Info
- 会议:CVPR
- 年份:2021
- https://nex-mpi.github.io/
Method
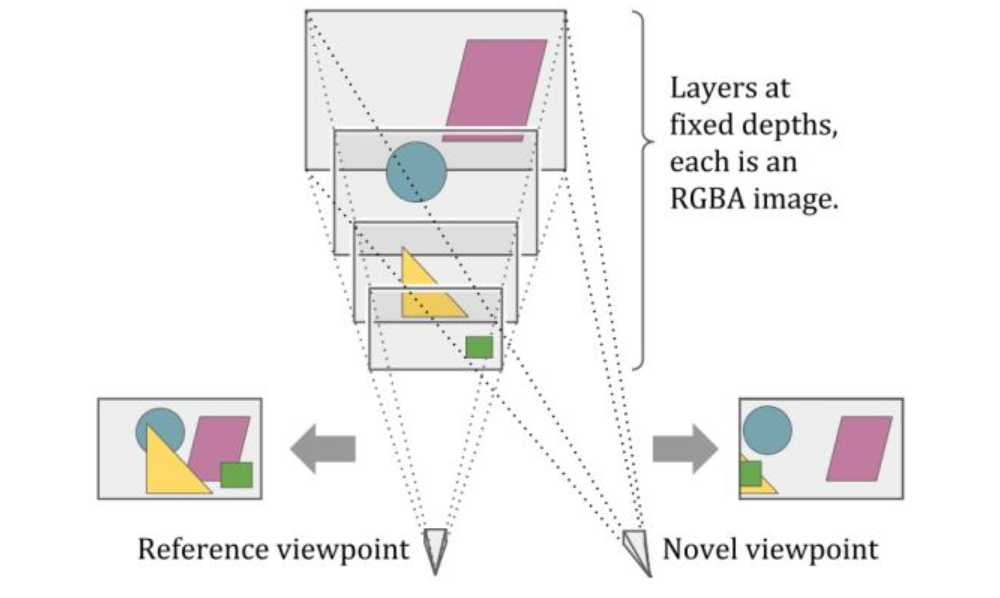
- 引入 multiplane image (MPI)
- 每张图存储 rgba 值
- 缺点:只能处理 diffuse 表面
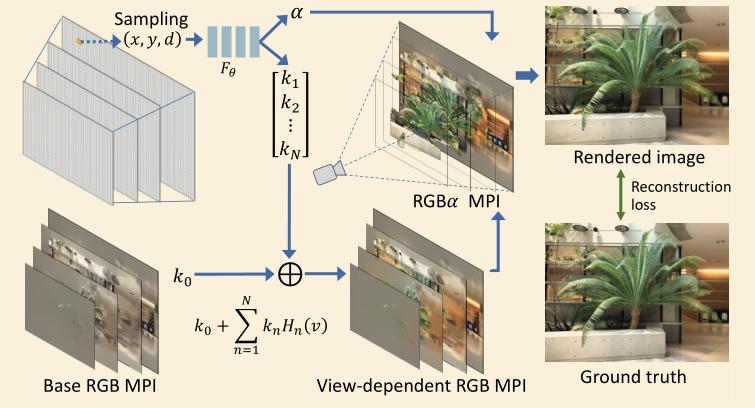
- view-dependent MPI
- 思路:存储的 rgb 值应该是视线方向的函数
- 学习一组全局的基函数,用神经网络表示
- MPI 中存储基函数的系数
- 学习两个网络
- $F_\theta$:位置 -> 基函数的系数 $k_n$
- 实验中发现把 $k_0$ 从神经网络里拿出来作为一组参数进行优化,最终效果会更好
- $G_\phi$:视角 -> 基函数 $H_n$
- $F_\theta$:位置 -> 基函数的系数 $k_n$
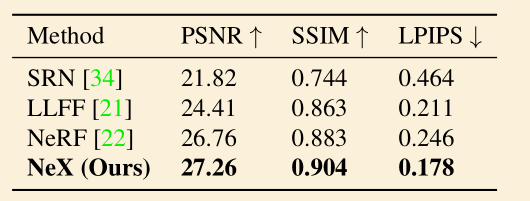
Result
- 核心工作在于解决 view-dependent,没有比较帧率
Baking Neural Radiance Fields for Real-Time View Synthesis
Info
- 会议:ICCV
- 年份:2021
- https://phog.github.io/snerg/
Method
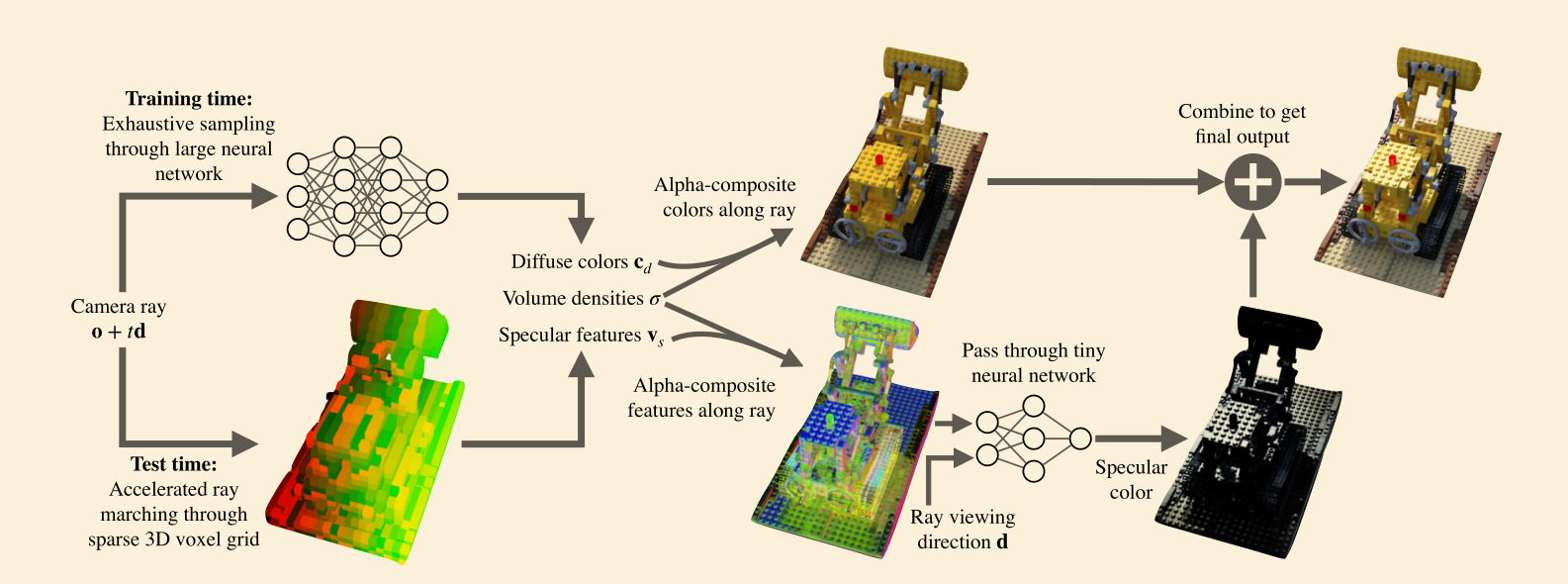
- 采用预计算的思路
- 使用两个神经网络,将 diffuse 和 specular 部分拆开
- 在每个采样点处使用一个大的神经网络
- 输入光线位置 + 方向,输出颜色、密度、用于 specular 的特征向量
- 对于 specular 部分,在 volume rendering 的累计结果上使用一个小的神经网络
- 输入累计的特征向量,输出 specular 的颜色值
- 在每个采样点处使用一个大的神经网络
- 训练时,将大网络的输出结果存储在 voxel grid 中
- 测试时,直接访问 voxel,不需要经过大的神经网络
Result
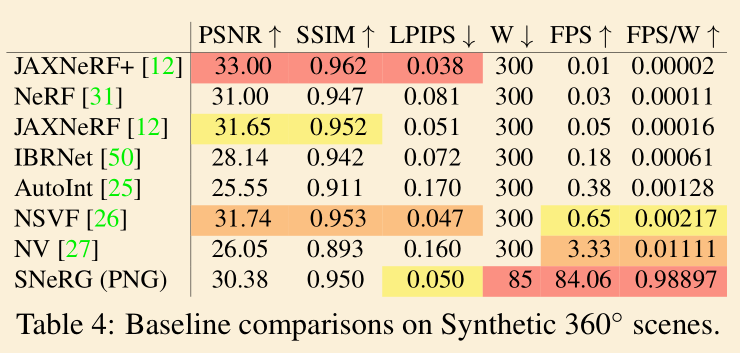
- 达到实时,数量级与同期的 FastNeRF,PlenOctrees,KiloNeRF 相同,但是数据上稍微差一点
- 都是 2021 年的论文
- 这几篇 paper 的思路基本是一样的,区别只在于实现细节 / 技术上的优化
- 用 voxel 划分场景 + 预计算
- 投影到基函数上
- 牺牲一定的质量,换来渲染速度