1 实时全局光照
1.1 简介
- 实时渲染中,一般考虑 one-bounce 的间接光照
- 把被光源直接照亮的表面看作新的光源(secondary light)
- 我们需要知道什么信息来计算间接光照?
- 哪些surface patch是被光源照亮的?
- 可以由shadow map找到
- 这些patch的贡献是多少?
- 把每个patch看做面光源
- 哪些surface patch是被光源照亮的?
1.2 辐射度量学
- Flux / Power
- 总能量大小
- Radiant Intensity
- 单位立体角上的能量大小
- Irradiance
- 单位面积上的能量大小
- Radiance
- 单位面积、单位立体角上的能量大小
2 Reflective Shadow Map (RSM)
3D 空间的实时全局光照
把 shadow map 上的每一个 texel 都认为是一个次级光源
假设:认为所有的反射物(次级光源)都是 diffuse 的
- shading point可能从各个方向看向次级光源,通过该假设可以简化计算
如果在 shading point 处采样,会有很多 sample 到不了 patch 处,从而被浪费
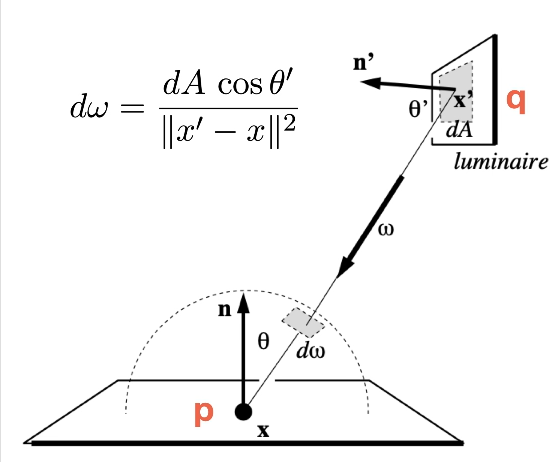
转换成在 patch 处计算
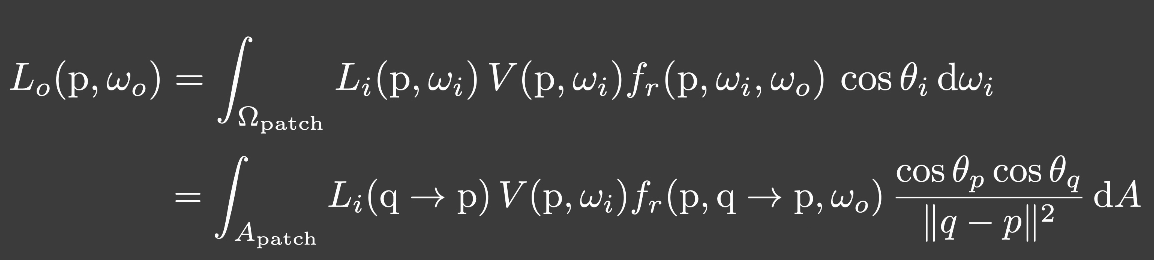
转换办法:把对立体角的积分转换为对面积的积分
对于次级光源(点 q 处)
- BRDF: $f_q = \rho / \pi$
- 这个并不是上面公式里的BRDF,而是点 q 处的
- 由假设可以知道,该BRDF是 diffuse 的
- 公式里是点 p 的 BRDF,这个BRDF 可以是 glossy 的
- Radiance: $L_i = f_q \cdot \frac{\Phi}{dA}$
- $\Phi$是直接光照打到 patch 上的能量
- BRDF: $f_q = \rho / \pi$
把上面的代换式代入积分中:

存在的问题
- 对于 Visibility 项
- 判断点p是否能看到点q
- 由于很难算,所以不去算了,直接忽略这一项
- 分母为什么是4次方
- 论文作者写错了,应该是平方
- 对于 Visibility 项
加速
- 理论上,并不是所有的texel都对p有贡献,有很多会被挡住
- 思路
- 把shading point投影到shadow map上
- 认为只有投影到shadow map上的位置附近的texel才对该点有贡献
- 对该区域进行采样
RSM中存储的内容
- 深度信息
- 世界坐标
- 法线值
- Flux
用途:经常用来处理手电筒产生的间接光照
优点:
- 易于实现,只需要扩展shadow map储存的内容
缺点:
- 性能消耗与光源的数量成正比
- 缺少了Visibility项,容易出现不真实的情况
- 做了非常多的假设,会影响最终质量
- sample数量 / 图像质量的tradeoff
3 Light Propagation Volumes (LPV)
- 核心思路:radiance 在直线传播的过程中不会发生变化
- 解决方案:用 3D 网格来传播 radiance
- 步骤
- 找到被光直接照射的表面,获得直接光照的 radiance
- 可以用 RSM 来获得这些次级光源
- 将该值注入到网格中
- 在每个网格中,将网格内的所有次级光源的结果累计起来
- 将该结果投影到 SH 上进行压缩
- 在网格中传播
- 每个网格向相邻的 6 个网格传播
- 不断迭代直到收敛
- 后续的渲染中,直接从网格中获得间接光的 radiance
- 每一帧都要重复以上步骤
- 找到被光直接照射的表面,获得直接光照的 radiance
- 存在的问题
- Light leaking
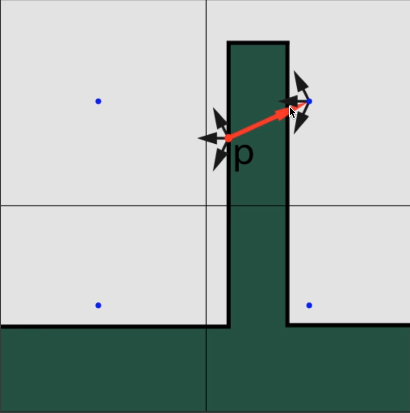
- 上图中,正确的情况下,点 p 反射的光无法照亮背面
- 然而每个网格发出的光被认为是 uniform 的,因此背面会被照亮
- Light leaking
4 Voxel Global Illumination (VXGI)
- two-pass algorithm
- 将整个场景体素化
- 用树形结构优化
- Pass 1:从光源出发,计算直接光结果
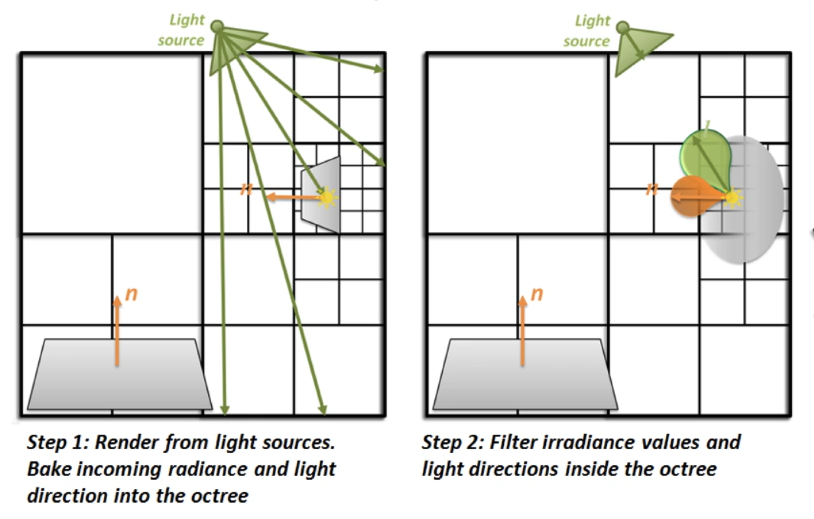
- 将直接光结果存储在 voxel 里
- 每个 voxel 中存储光线方向(绿色)和法线方向(橙色)的分布,以解决 glossy 材质
- 不同于 LPV 中存储的 SH
Pass 2:从相机出发,渲染结果
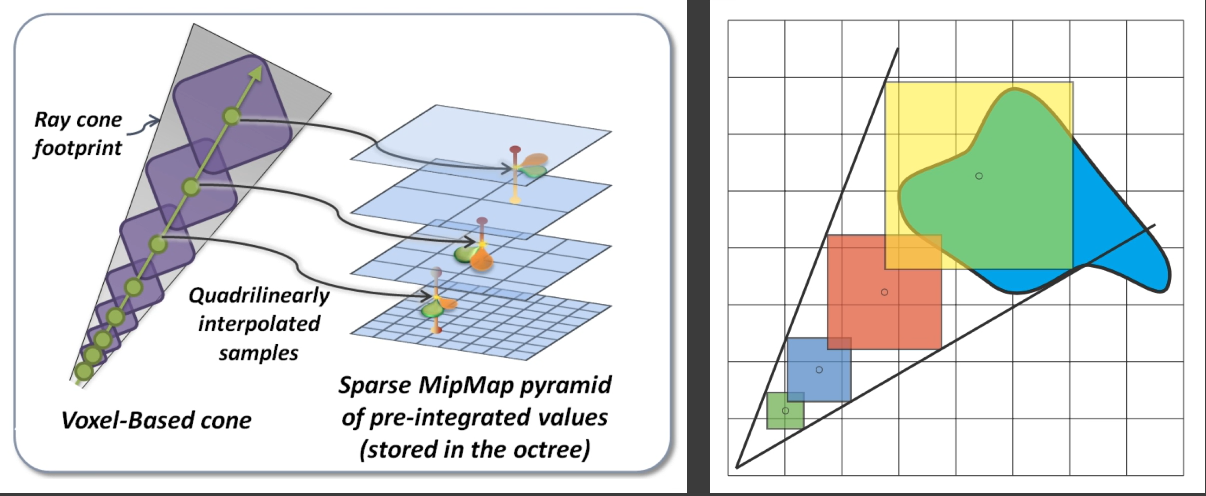
- 找到 shading point 对应的 voxel
- 根据 voxel 中存储的光线方向分布,trace 一个圆锥
- 根据圆锥大小的增长,在对应层级的 voxel 上进行采样
- 对于 diffuse 表面,采样若干个小圆锥
渲染质量比 LPV 高,但是开销更大
- 思路比较接近离线渲染