1 时间上的滤波
- 关键思路
- 假设上一帧已滤波,并重复利用上一帧的信息
- 利用 motion vector
- SPP 的累积数量是指数递增的
- back projection
- 找到当前帧 i 中的像素 x 在第 i - 1 中的像素位置
- 第一步:将屏幕空间的点变换到世界空间中
- 可以用 G-buffer 预先储存世界坐标
- 如果没有储存,做坐标变换即可:$s = M^{-1}V^{-1}P^{-1}E^{-1}x$
- 假设上一帧到这一帧的变换为 $s’ \overset{T}{\rightarrow}s$,则 $s’=T^{-1}s$
- 使用上一帧的坐标变换,投影到上一帧的屏幕空间:$x’=E’P’V’M’s’$
先对当前帧做 spatial 降噪,再与上一帧进行 alpha blend
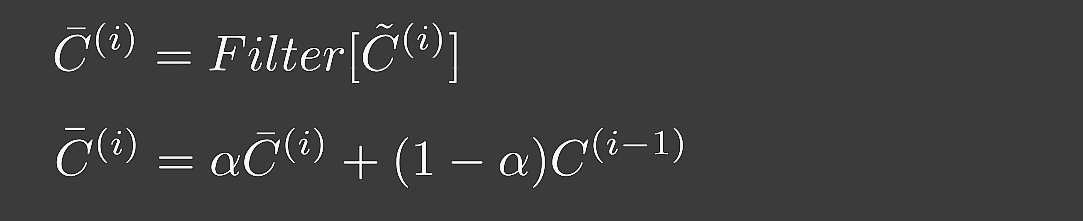
- $\alpha$ 一般取 0.1 - 0.2
存在的问题
- 切换场景 / 场景的第一帧
- 场景、光照的突变
- 倒退着走的情况
- 从屏幕边缘新出现的点在上一帧没有出现
- 突然改变的遮挡关系 (disocclusion)
- 上一帧的某个被挡住的物体在这一帧出现了
- 本质原因:G-buffer 只储存了屏幕空间的信息
- 如果强行使用上一帧信息,会出现残影

- shading 带来的问题
- 阴影
- glossy 材质
- 切换场景 / 场景的第一帧
解决办法
- Clamping
- 先将上一帧的结果 clamp 到接近当前帧的结果,再进行混合
- Detection
- 检测上一帧的像素是否可用
- eg. 记录一个 object ID,检测上一帧对应的物体是否与当前帧相同
- 如果发现上一帧不可用,调整 $\alpha$ 的值,增大当前帧的权重
- 新带来的问题:引入了更多当前帧的噪声
- 检测上一帧的像素是否可用
- Temporally Reliable Motion Vectors for Real-time Ray Tracing, Eurographics 2021
- Clamping
2 空间上的滤波
高斯滤波
- 低通滤波,只保留低频信息
- 滤波时,根据周围像素 j 到中心像素 i 的距离,由高斯函数确定权重
双边滤波
- 在高斯滤波的基础上,保留边缘信息
- 边缘 $\leftrightarrow$ 剧烈变化的颜色值
- 添加一项基于颜色差值的高斯函数

- 第一项:基于距离的高斯函数
- 第二项:基于颜色值的高斯函数
联合双边滤波
- 用更多的 distance 来指导滤波
- 利用 G-buffer 中的信息
- G-buffer 中的信息是无噪声的
- 考虑深度、法线、颜色
如何实现大的滤波核
Separate Pass
- 二维滤波 $\rightarrow$ 先水平滤波一遍,再竖直滤波一遍
- $N^2 \rightarrow N + N$
- 原理:二维高斯函数可以拆分成两个一维高斯函数的乘积
- $G{2D}(x, y) = G{1D}(x) \cdot G_{1D}(y)$

- 理论上,双边滤波是没办法拆开的
- 实际上,为了效率仍然会拆开计算,且结果基本无区别
Progressively Growing Size
过滤若干次,每次都滤波核大小不断增长
例子:a-trous wavelet 滤波器
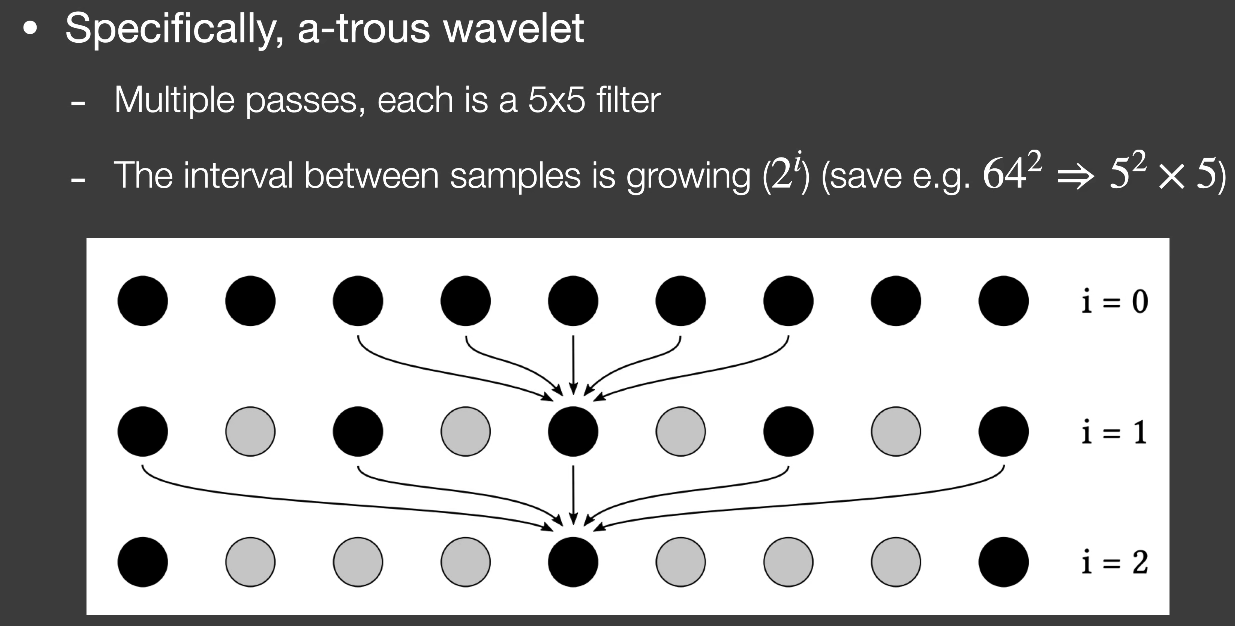
原理
- 更大的 filter == 去除更低频的信息
- 采样 == 搬移频谱
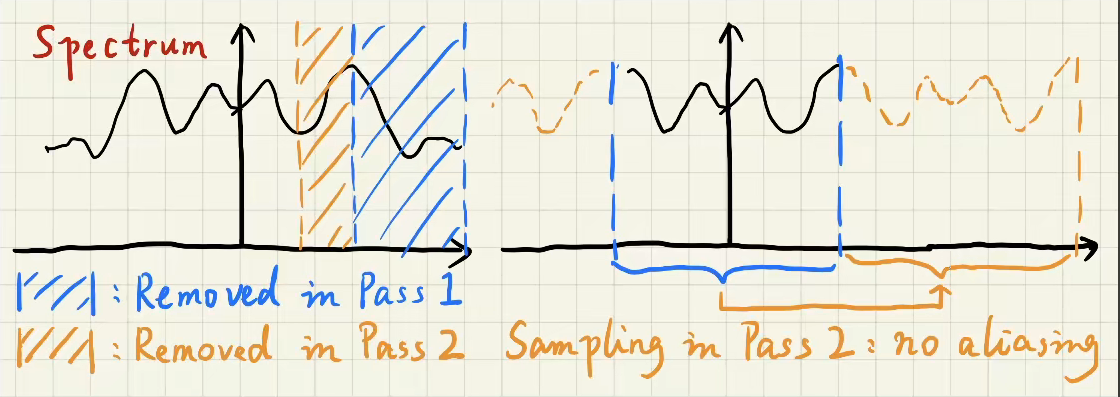
- 存在的问题:很多滤波核并没有把高频信息全部扔掉
Outlier Removal
- 对于图像中非常亮的点,滤波会出现问题
- 特别亮的点会被扩散到周围像素,产生 fireflies / blocky artifacts
- 特别亮的点称为 outlier
- outlier detection
- 寻找 7 x 7 范围内的像素
- 计算均值和方差
- $[\mu-k\sigma, \mu+k\sigma]$ 范围外的点即为 outlier
- outlier removal
- 把 outlier 的像素值 clamp 到 $[\mu-k\sigma, \mu+k\sigma]$ 范围内
- 用于时序的 clamping
- 如果上一帧的像素不可用,需要把上一帧的结果 clamp 到当前帧的范围内
- $\text{clamp}(C^{(i-1)},\mu-k\sigma, \mu+k\sigma)$
- 是噪声和残影之间的一个 tradeoff
- 对于图像中非常亮的点,滤波会出现问题
3 Spatiotemporal Variance-Guided Filtering (SVGF)
- 联合双边滤波
- 深度
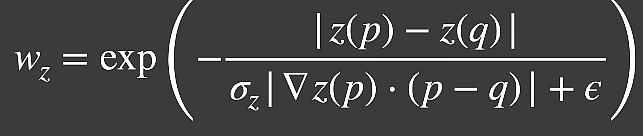
- $\epsilon$:防止分母为 0
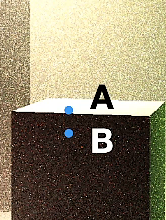
- 用深度差除以梯度,从而让侧面上两个点对彼此的贡献增大
- 可以理解为切平面上的深度差距
- 法线

- 不应用法线贴图
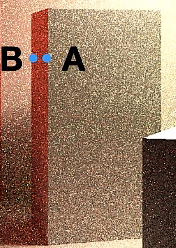
- 颜色
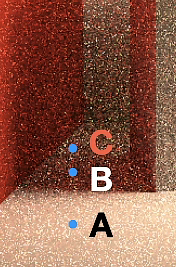
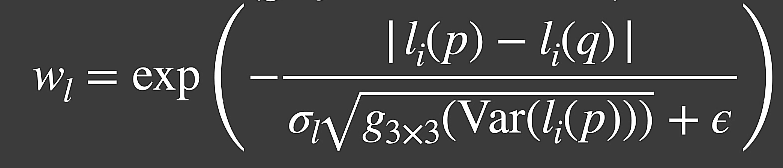
- 为了避免 B 点过亮导致与 A 点的颜色相近,在分母加上一个方差项
- 如何求分母的方差
- Spatial:在目标点周围 7 x 7 范围内求方差
- Temporal:在时域上对该方差做平均
- Spatial:对上述平均值,用一个 3 x 3 的核进行滤波
4 Recurrent AutoEncoder (RAE)
关键思路
- 用神经网络降噪
- 输入:G-buffer、noisy image
- 输出:clean image
- 神经网络自动累积 temporal 信息
- recurrent convolution block
- 用神经网络降噪
网络结构:U-Net
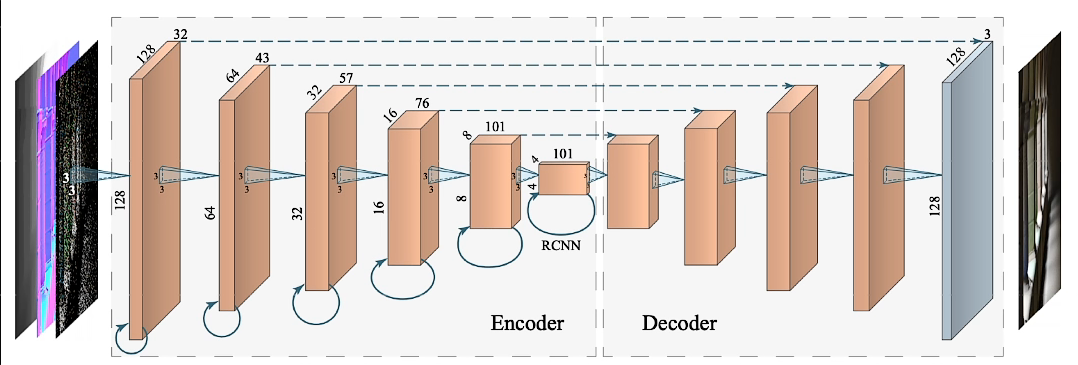
训练时需要使用连续帧
没有使用 motion-vector
缺点
- overblur、artifact 会比较多
对比
